Finding Your Way With Telepresence
By Mark Ciotola
First published on September 22, 2024. Last updated on November 3, 2024.
Finding Your Way With Telepresence
By Mark Ciotola
First published on September 22, 2024. Last updated on November 3, 2024.
Table of Contents
- 1 Introduction
- 2 Types of Telepresence
- 3 Telepresence Technologies
- 3.1 Sensor Technologies
- 3.2 Manipulative and Operational Technologies
- 4 Applications
- 4.1 Telepresence In The Lab
- 4.2 Telepresence In The Classroom
- 4.3 Telepresence in the Deep Sea
- 4.4 Telepresence In Deep Space
- 5 Future of Telepresence
- 6 Related Literature & Resources
Telepresence can bring people to many places, even all at the same time. Where would you like telepresence to bring you? How, in what manner?
This book will help you begin your journey.
Telepresence can bring people to many places, even all at the same time. Where would you like telepresence to bring you? How, in what manner?
This book will help you begin your journey.
-
1 Introduction
First published on . Last updated on August 24, 2025.
I have long been fascinated by telepresence, literally the ability to be anywhere. High quality video conferencing is a form of telepresence. I facilitate videoconferences for CMU classes that literally span the globe.
It has been said that a long journey begins with a single step. Telepresence can change that. You can go on a long journey without taking any steps. Of course, unless you are using mere imagination, you will require technology.
The term telepresence was suggested by independent scholar and futurist Patrick Gunkel and popularized by computer scientist Marvin Minsky (Minsky, 1980) and originally referred to remote control tools. A more contemporary definition is “technology that enables a person to perform actions in a distant or virtual location as if physically present in that location” (Mirriam Webster).
The essence of telepresence is being able to sense and perceive a different location, typically bit not necessarily, in real time, and in more advance cases, performing actions in remote locations.
Broadly interpreting the term “remote”, an early form of telepresence can be said to be the telescope. As early as the 1500s, people were using telescopes to experience distant locations, from large expanses of seas to the moons of Jupiter. Gazing through a telescope is generally a passive form of telepresence. You can’t really do anything to what you see. This observation anticipates active telepresence, where you can take an active role in remote locations.
From a more modern perspective, “The IEEE Telepresence Initiative described telepresence as “a complex field, requiring knowledge and technology from robotics, extended reality, system networks, human-computer interaction, neuroscience, psychology, and artificial intelligence.”
Minsky felt that “the biggest challenge to developing telepresence is achieving that sense of ‘being there’.” (Minsky). In contrast, for some modern telepresence systems, such as video conferencing, good audio and visual communications are sufficient, whereas a sensory rich, tactile experience is not necessary or even desirable (IEEE Telepresence Initiative, 2024).
Telepresence is important because Sometimes it is important to be where you can’t be, or to operate in extreme, harsh environments, for the remote application of expertise, and in cases in which human capabilities, such as movement precision, are insufficient.
Telepresence is different than robotics. Robotic systems are autonomous. They do not require human intervention. Telepresence systems (aside from those that merely sense) require human control and operation. For example a remote telepresence rover would be driven by a human operating remote controls. A robotic rover would drive itself.
Review Questions
- What are three examples of telepresence?
- Who was an early telepresence pioneer?
Reference
IEEE Telepresence Initiative, 2024, “Chasing a Dream: The Quest for Minsky’s Concept of Telepresence, IEEE Telepresence Initiative White Paper”, November.
Minsky, Marvin, 1980, “Telepresence”, OMNI Magazine, June.
Mirriam Webster. Last viewed on 24 August 2025. https://www.merriam-webster.com/dictionary/telepresence
-
2 Types of Telepresence
First published on . Last updated on April 16, 2026.
Telepresence comes in several broad categories. Types of telepresence include passive telepresence and active telepresence. The several types of telepresence constitute more of a spectrum than a few isolated types. We will use these classifications. In addition, Draper et al. describe the types of telepresence as being simple telepresence, cybernetic telepresence, and experiential telepresence (Draper et al., 1998).
Passive Telepresence
Passive telepresence allows one to sense a remote location but not take any in situ actions or influence or manipulate the remote location. This is “essentially an advanced form of video conferencing” (Lasky, 2024).
Aforementioned telescopes are an example of passive telepresence. A person can observe the remote location and even sense some of its illumination, but cannot actively affect the remote location.

Fogcam example view updated every 20 seconds. (Credit: San Francisco State University)
Another example of passive telepresence is webcams. Fogcam at SFSU is the oldest functioning webcam. Webcams allow you to feel like you are somewhere else, but they are passive in the sense that you can’t do anything except look around, although some webcams will allow you to to move the camera around.
UW Continuum College Cam
Intermediate Telepresence
An intermediate form of telepresense involve mobile sensors. Cameras mounted on rovers, such as the Aubot Teleport telepresence “robot” provides more active telepresence by allowing a viewer to move around. A lunar or Martian rover whose only purpose is observation fits in the category. Such telepresence can alter the remote location. For example, rovers leave tread marks and trails in the dust and soil of the Moon and Mars.
Active Telepresence
Likewise there are increasing levels of influence upon a remote environment, until one achieves a more robust active telepresence. Active telepresence “uses robotic devices that allow a person to navigate in an environment and interact with people and objects there from a remote location” (Lasky, 2024). This is “telepresence as a form of teleoperation”, which is what Minsky originally meant by the term “telepresence”.(Lasky, 2024).
Some planetary science rovers on Mars have scoops and drills to manipulate their environment for improved sensing capabilities. Remote control surgery (such as by Computer Motion and Intuitive Surgery machines) is an invasive form of active telepresence to manipulate remote environments to achieve an effect, such as surgery to remove cancer.
Lasky, Jack, 2024. Telepresence. https://www.ebsco.com/research-starters/computer-science/telepresence
-
3 Telepresence Technologies
First published on November 3, 2024. Last updated on August 24, 2025.
There are several types of technologies that enable telepresence. They fall into three major categories: input/output, controls and telecommunications. Input/output devices include those which most people are familiar such as video camera and computer monitors, but also include numerous sensor technologies beyond ordinary audiovisual cameras and microphones. A combination of control, input/output and manipulation technologies can allow an operator to remotely change remote environments.
-
3.1 Sensor Technologies
First published on August 24, 2025. Last updated on August 24, 2025.
Since there have been many books written on various sensor technologies, only a high level survey will be provided here.
Microphones and Speakers
Microphones and audio speakers are one of the earliest categories of technologies used for telepresence to transmit remote sensations. Microphones are used for audio inputs.
Speakers are used for people to hear the audio sensations collected by microphones. If sufficiently powerful, speakers can also be used for tactile use to feel transmitted vibrations.
Camera
Cameras are used for visual inputs. Projectors are used for visual outputs and speakers are used for audio outputs. There are many varieties of these.
Others
However, there are other input/output technologies. For example sonic sensors can perceive distance that can be expressed via audio “pings”. Haptic technologies can perceive and render tactile sensations. Human controlled “robot” arms are an input technology in terms of control and an output technology as regards the remote environment that have manipulation capabilities. If a human operator can feel what the robot arms feels, then the the robot arm sensors are an input device and the means of communicating sense to the human is an output technology.
-
3.2 Manipulative and Operational Technologies
First published on . Last updated on August 24, 2025.
Electrical-mechanical appendages can both sense remote environments and create change in them. Such appendages are often referred to as “robotic” arms even though this is a misnomer, since it is the human who is providing direct control. Such appendages can grip and hold objects or manipulate objects. They can be used to perform delicate surgical operations or bulk movement of materials.
-
4 Applications
First published on November 3, 2024. Last updated on July 26, 2025.
Telepresence can be used for many different applications. A common application is video conferencing. Another is for classrooms with students or instructors who are online. Yet another is to gather data from deep space and control equipment there. We will explore several applications here.
-
4.1 Telepresence In The Lab
First published on September 22, 2024. Last updated on November 3, 2024.
Telepresence can be used to provide access to lab and other scientific equipment in other locations. This can increase accessibility to equipment and provide cost savings by increasing user economies of scale. One example is online access to observatories. For example, the Observing With NASA site will allow you to take your own astronomical photos.
An example of telepresence in the lab is Labsland, an educational tool to conduct lab experiments remotely on real equipment.
-
4.2 Telepresence In The Classroom
First published on . Last updated on November 3, 2024.
Telepresence in the classroom can be purely passive, where the instructor lectures to a remote location without the possibility on interaction or feedback. Such would be like watching a real time television show or listening to radio. It’s live, but unlike students in a classroom, or even spectators as a sporting event, communication is only one way. The audience can experience what is on the other side of the connection, can adjust the volume or image, bit cannot change reality at the source of this one-way communication.
An intermediate level is where students can type questions for the instructor in a chat window. However, a two way connection between the instructor and remote participants, or an instructor and a remote classroom, allows for real time, active telepresence in both directions. Instructors can interact with students in real time, nearly as well as being there. Software and web platforms such as Zoom, Webex, Google Meet and Team Viewer provide for multidirectional active telepresence.
Special classrooms set up with multiple, large monitors can increase the feeling of being at the other side of the communication.
Some classrooms attempt to go further and display a remote instructor via three-dimensional holographic projection. Such devices can be challenging to maintain and are not widely used. Daniel Bron describes holographic telepresence technology as “cutting-edge innovation that enables life-like, three-dimensional (3D) representations of people or objects to be projected in remote locations, facilitating real-time communication and interaction.”
Source
Daniel Bron (2023), “Communication and Collaboration in the Digital Age“, Medium,
Apr 23, 2023. Last viewed on 15 September 2024.
-
4.3 Telepresence in the Deep Sea
First published on February 23, 2025. Last updated on July 26, 2025.
Telepresence is used extensively for deep sea exploration and work. The U.S. National Atmospheric and Oceanic Administration (NOAA) operates several remotely operated vehicles (ROVs) working at depth in real time. The ROVs are operated by Exploration Command Centers (ECCs).
“Telepresence involves the use of technology to allow a person to feel, interact, and collaborate as if they were present at one location when in fact they are at a different location.” (NOAA Telepresence Technology). “When applied to ocean exploration, telepresence technology allows a potentially unlimited number of scientists on shore to participate in at-sea ocean exploration, adding their expertise to missions no matter where in the world a ship, or the scientists, are located.” (Id.)
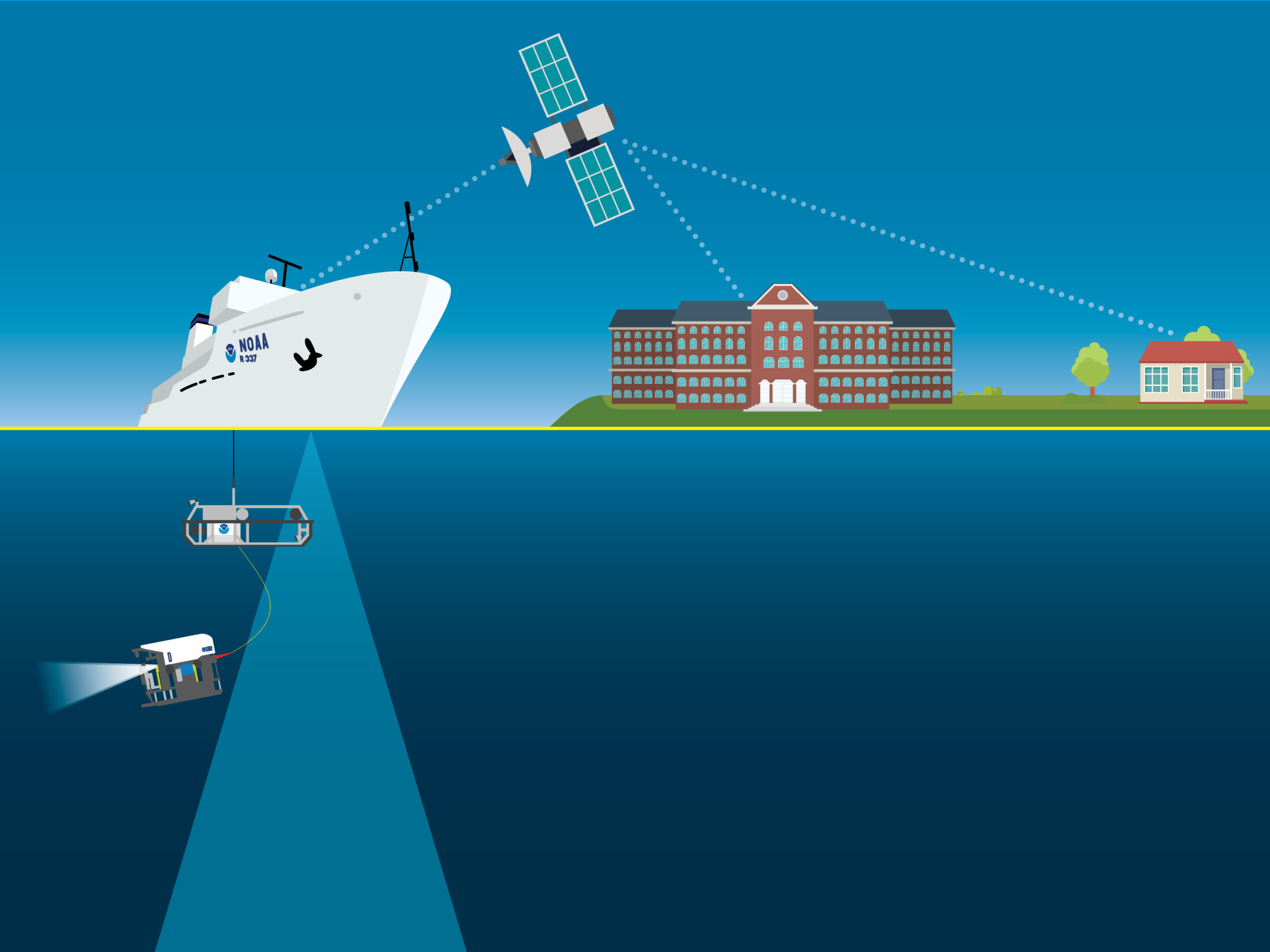
NOAA Ocean Exploration uses telepresence technology on NOAA Ship Okeanos Explorer to transmit data in real time to a shore-based hub where the video is then transmitted to any internet-enabled device. Access to the video and a suite of online collaboration tools allow scientists and the public on shore to join the expedition as it is happening.
Also, the U.S. Geological Survey (USGS) also uses telepresence to observe remote locations where it is difficult to locate humans, such as examining deep sea corals. (USGS 2019).
“Telepresence has changed the game of deep-sea science and exploration. Now, many research vessels and underwater robots live-stream their activities. This allows shore-based scientists to interact with and assist researchers at sea, and anyone from around the world can tune in from the comfort of their home or office to explore never-before-seen areas of the seafloor and engage with scientists in real time” (USGS 2019).
References
U.S. Geological Survey (USGS), Telepresence connects scientists at-sea with shore-based audiences
By Wetland and Aquatic Research Center, JUNE 20, 2019. (Last viewed on June 19, 2025). https://www.usgs.gov/news/science-snippet/waterwords-telepresenceU.S. National Atmospheric and Oceanic Administration (NOAA), Introduction to Telepresence. (Last viewed on February 23, 2025). https://oceanexplorer.noaa.gov/okeanos/edu/collection/media/hdwe-TPbkgnd.pdf
U.S. National Atmospheric and Oceanic Administration (NOAA), Telepresence Technology. (Last viewed on February 23, 2025). https://oceanexplorer.noaa.gov/technology/telepresence/telepresence.html
U.S. National Atmospheric and Oceanic Administration (NOAA), The Evolution of Telepresence Technology. (Last viewed on February 23, 2025). https://oceanexplorer.noaa.gov/explorations/07blacksea/background/telepresence/telepresence.html
-
4.4 Telepresence In Deep Space
First published on September 22, 2024. Last updated on November 3, 2024.
Deep space is anything beyond Earth orbit. It will include the Lunar Gateway and any spacecraft on the Moon. Latency between the Earth and the Moon locations is noticeable, but modest, roughly on the order of one second due the distance from the Earth, and perhaps longer due to technology and configuration issues.
However, telepresence to locations such as Mars and beyond are considerably more problematic. Communications are limited by the speed of light, and Mars is far enough that roundtrip radio or laser communications require at least 20 minutes.
Two way telepresence is not limited to visual and audio communications. It is possible to transmit touch and movement. The Emerge device provides the ability to feel movement by a remote person’s hands. (Disclaimer: the author was an early-stage advisor to Emerge).
An example of more advanced control and tactile feedback are the exoskeleton suits being developed at the Earopean Space Agency’s Exoskeleton suit at ESA Telerobotics and Haptics Laboratory at ESTEC in Noordvijk, Netherlands.An exoskeleton can potentially control machinery or humanoid robots in inhospitable environments, such as on the Moon, Mars or asteroids, or allow a remote person to engage in in situ activies, such as a surgeon on Earth performing surgery on a patient on the Moon. Not that latency can become an issue, though, for moving spacecraft, the travel time for radio waves can make real time telepresence inpossible for very long distances sch as between the Earth and Mars.

Haptioc sensor arm at ESA Estec Haptics laboratory
-
5 Future of Telepresence
First published on August 24, 2025. Last updated on August 24, 2025.
Due to its potential uses, telepresence promises to have a bright future. It can be used for high value operations such as deep sea mining and space operations. As remote work gains a growing acceptance and telepresence technology advances adoption is expected to increase.
One challenge to increased adoption is if highly intelligent, humanoid robots become sufficiently advanced to replace humans.Such robots might be able to conduct operations more effectively and economically than remote human operators. However, for the present, this is not the case, so expect the frontiers telepresence to continue to expand.
-
6 Related Literature & Resources
First published on August 30, 2025. Last updated on September 2, 2025.
This page contains links to related literature and resources. There might be redundancy with other pages.
Akin, David L., Russell D. Howard, Joseph S. Oliveira (1983). Human Factors In Space Telepresence. Space Systems Laboratory Massachusetts Institute of Technology, Cambridge, Massachusetts. October, 1983. SSL # 41-83. Discusses the problems of interfacing a human with a tele-operation system,for work in space.
Aubot. Teleport mobile telepresence device. (Last viewed 30 August 2025). https://aubot.com/products/teleport
Draper, John V., David B. Kaber and John M. Usher (1998). “Telepresence”, Human Factors, pp. 354–375, September 1998. The definition and types of telepresence are discussed, being simple telepresence, cybernetic telepresence, and experiential telepresence.
IEEE 2024. Chasing a Dream: The Quest for Minsky’s Concept of Telepresence. IEEE Telepresence Initiative White Paper, November 2024, v.1
Leithinger, Daniel, Sean Follmer, Alex Olwal, Hiroshi Ishii (2014). Physical Telepresence, “a project by the Tangible Media Group at the MIT Media Lab. The project is an interface which tracks hands and 3d objects on one end of a video chat and recreates the shape using a grid of variable height physical columns.” (Last viewed 30 August 2025). https://courses.ideate.cmu.edu/54-498/f2015/index.html%3Fp=10941.html
Mair, Gordon, (1999). Transparent telepresence research. The Industrial Robot, 26(3), 209-215. This article outlines some of the recent telepresence and teleoperation work being carried out in the Transparent Telepresence Research Group at the University of Strathclyde. doi:https://doi.org/10.1108/01439919910266875
Minsky, Marvin, 1980. “Telepresence”, OMNI magazine, June 1980. Republished by MIT. (Last viewed 30 August 2025). https://web.mit.edu/dxh/www/marvin/web.media.mit.edu/~minsky/papers/Telepresence.html
Ohmnilabs. OhmniCare telehealth mobile telepresence product webpage. (Last viewed 30 August 2025). https://ohmnilabs.com/products/ohmnicare-mobile-telehealth-robot/
Zollhoefer, Michael. Website concerning “fully immersive remote communication and interaction in the virtual world”. (Last viewed 30 August 2025). https://zollhoefer.com/index.html